Developed an endoscopic detachable surgical robot system for Endoscopic Submucosal Dissection (ESD)
Introduction
Natural orifice transluminal endoscopic surgery(NOTES), unlike laparoscopic surgery, approaches the surgical site through natural openings, leaving no external scars.
Endoscopy, which is mainly used in internal medicine of digestive organ, is originally a device for diagnosis and simple treatments.
Conventional endoscopes can be controlled using a hand-controller, but their movement is limited, making it difficult to perform high-level surgery.
Furthermore, when the endoscope is rotated to examine the lesion, it is difficult for the entire endoscope to rotate, turning the patient around, or turning the entire control panel around.
In the case of a skilled physician, a high degree of surgery is possible, including endoscopic submucosal dissection (ESD), despite limited movement of the diagnostic endoscope.
The goal is to establish a surgical robot system to enable high-level operation such as ESD.
Research Territories
(1) Endoscopic Surgical Robot System
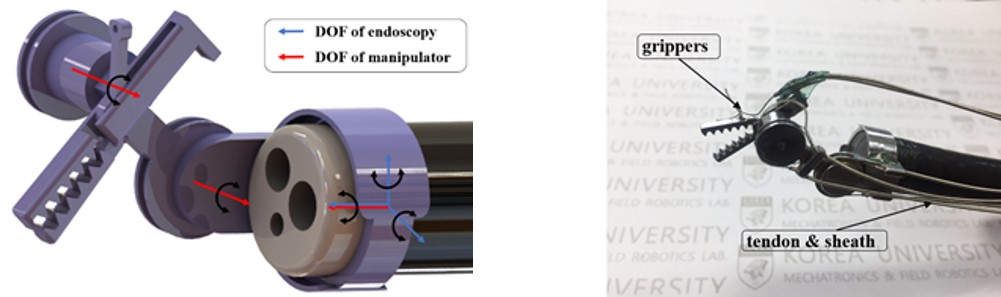
- Surgical robots were devised to support ESD surgery. It was developed as a manipulator type robot with a 2 DOF link structure and a 1 DOF roll joint to improve the insufficient degree of freedom of the endoscope and was designed to facilitate the internal incision by lifting the tissue at the incision site during ESD surgery.
Unlike other surgical robots that have an integral structure with an endoscope, they can be easily installed and dismantled in general-purpose endoscopes. It is expected that it will have advantages in terms of convenience and cost compared to endoscopic integrated robots in commercialization in the future.
(2) Tendon-sheath Mechanism(TSM) Analysis; Research for Control of Surgical Robot
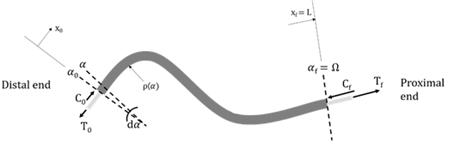
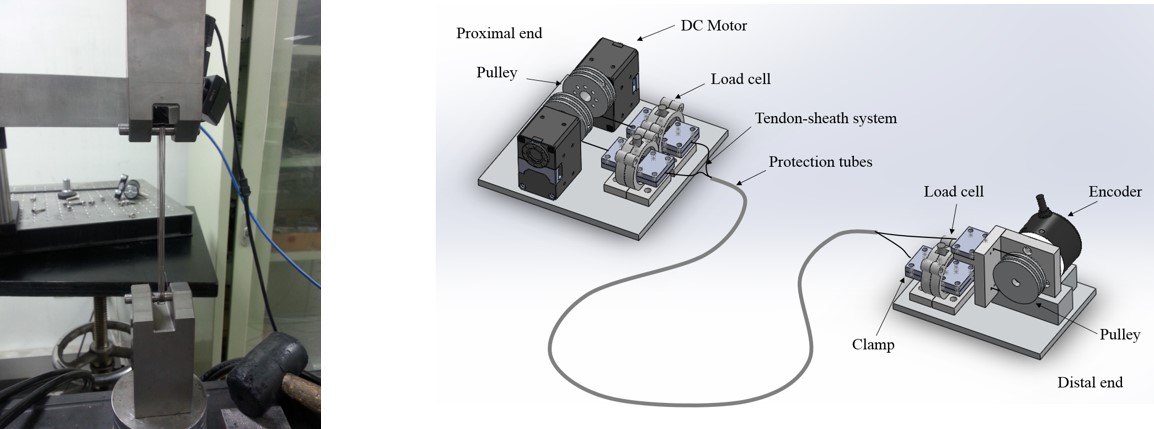
In order to drive the robot, it uses the Tendon-sheath Mechanism (TSM) to transmit driving force from the proximal end to distal end.
The required control input during robot operation shows a very non-linear characteristic due to TSM path change and required drive torque variation
-The aim of this study is to study the mechanical and material properties of TSM for safety, stability and accuracy of surgical robots.

(3) Clinical trials using the endoscopic surgery robot
in-vitro

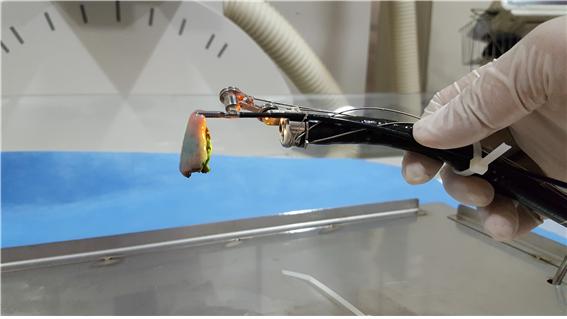
In the case of unskilled persons, six times of gastric perforation occurred in 10 conventional procedures (60%), and 0 in gastric perforation in robot surgery (0%).
In-vitro results showed that robotic surgery did not significantly increase the time required for surgery, while reducing the incidence of perforation of non-skilled workers compared to conventional surgery.
in-vivo
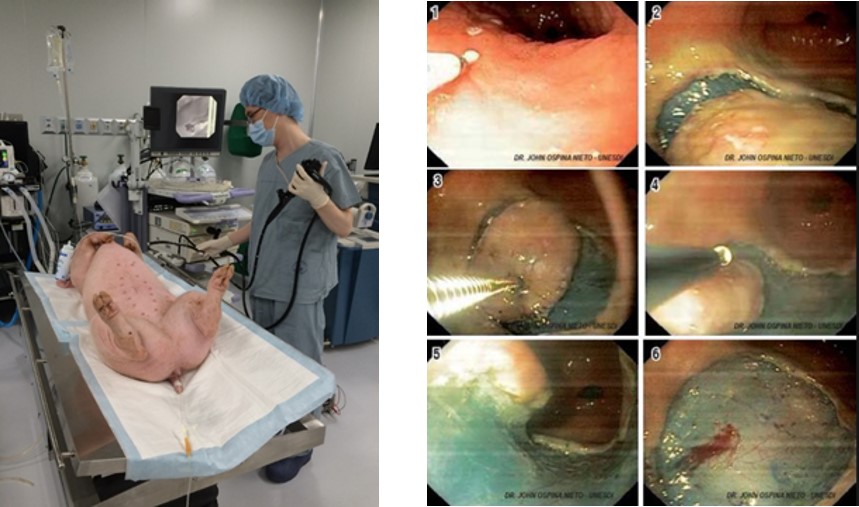
In-vivo experiments confirmed that survival ESD surgery is possible with this robotic surgical system. Multiple survival in vivo experiments in progress.