Development of Collaborated Self Control System and Unmanned Excavator Technology for an Automated Earthworks
Introduction / Motivation
In order to maintain and promote productivity of construction site while shortage of skilled workforce is escalating,
the smartification is required for construction equipment. The smartification includes the automatic control,
based on feedback from work environment, and the artificial intelligence, based on big data, which is multivariate
and gathered from environment measurement / equipment’s control states & commands in accordance with expert’s operation.
This research focuses on excavator’s automation from excavation to truck loading, based on artificial intelligence:
Machine learning (Statistics-based method/Neural Network). This will use multivariate training data from various work cases
for robust automatic excavator against unpredictable work environment.
Research Territories
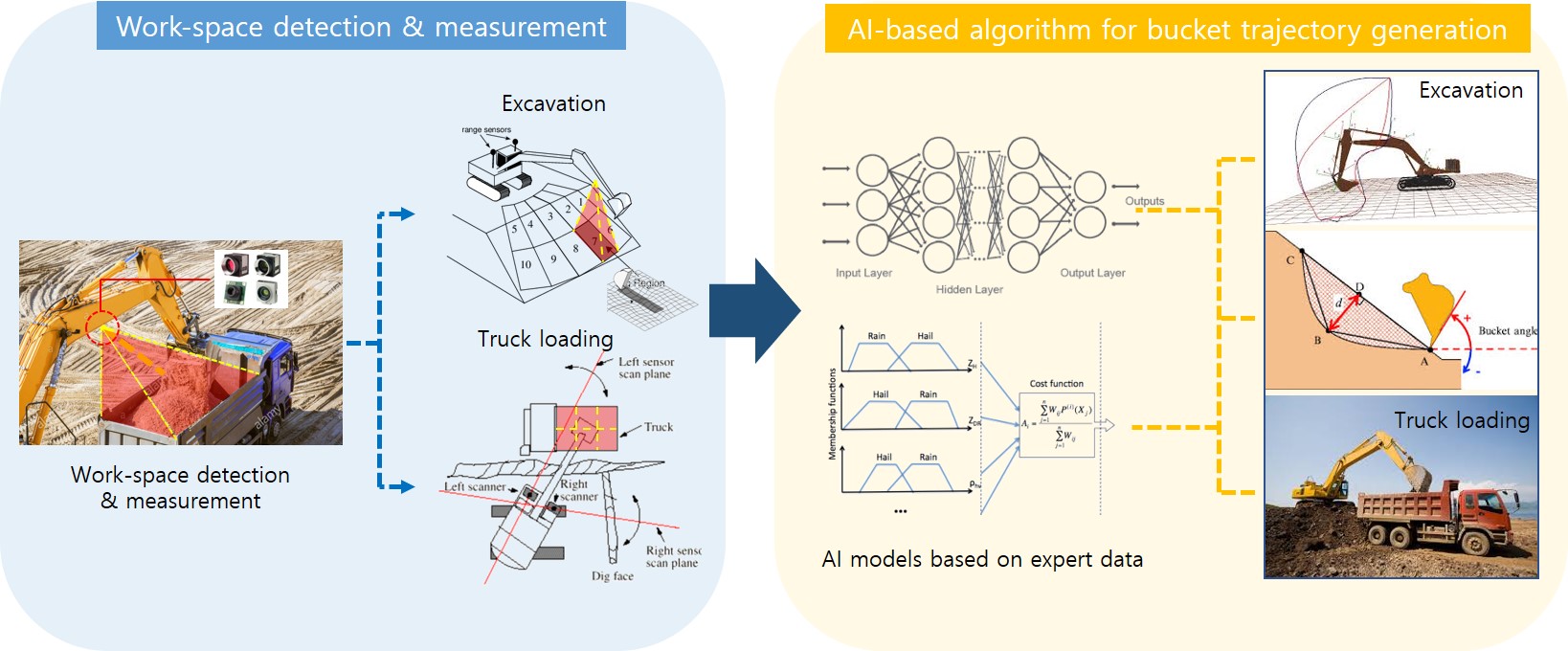
(1) AI based, Algorithm of bucket trajectory generation from excavation to truck loading
Based on measurement of expert’s excavator manipulation, the big data will be gathered to
develop model of machine learning or neural network structure with state estimation and action decision
after layer of training data set is defined, considering statistical relation and effect between command
input and desired output.
The AI control models, based on this data, will generate excavator bucket trajectory for bucket to fill enough
soil in it and move to truck container without crash. The HW computing system, to apply AI models to excavator
manipulation controls, will be developed and equipped in excavator, using excavator’s sensor / power system.

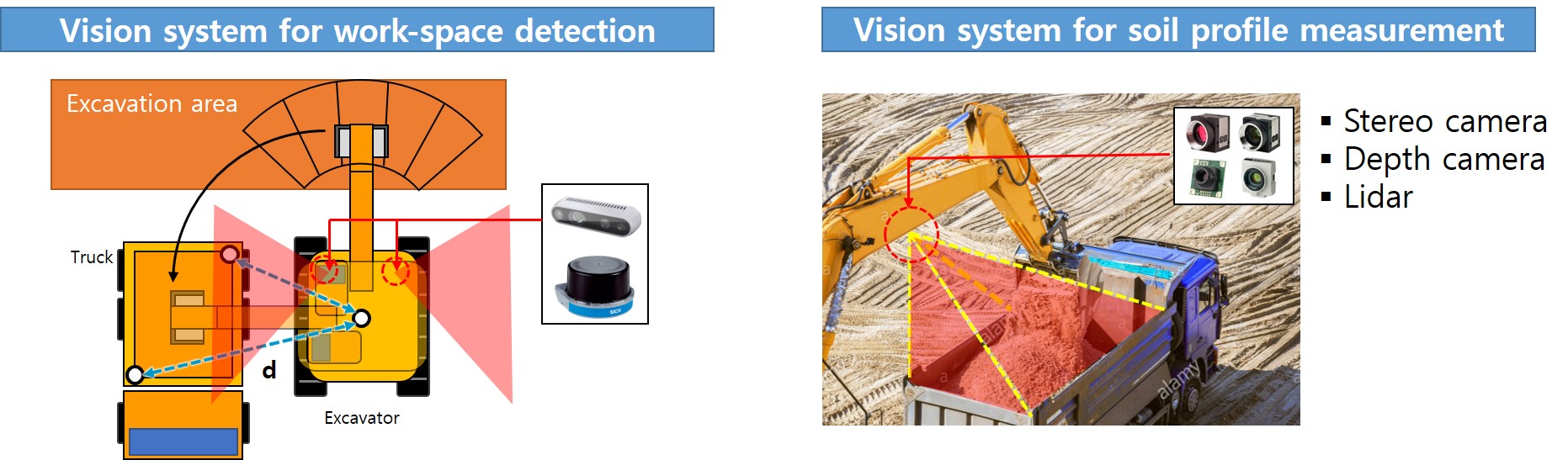
(2) Work-space detection & measurement system for excavator-truck collaboration
For soil loading on truck without crash, the work-space detection & measurement system, installed on excavator’s boom, will be developed. Furthermore, sensors of this system will be used to make AI model for soil loading on truck. AI model for soil loading is to load uniformly soil on truck container without soil overload on partial area of truck container.