Development of narrow space searching robot technology for detecting and rescuing burden in collapsed area
Introduction / Motivation
In recent days, research on the smart factory, the smart construction, and the automation in construction has been actively conducted. The study regarding automation and advancement in the efficiency of excavators is an example of the smart construction. Such full automation has resulted in a huge enhancement in the industry, however, several tasks in construction sites are challenging to fully automate, still requiring skillful workers. Therefore, we are working on research for assisting the workers’ tasks and reducing their musculoskeletal diseases.
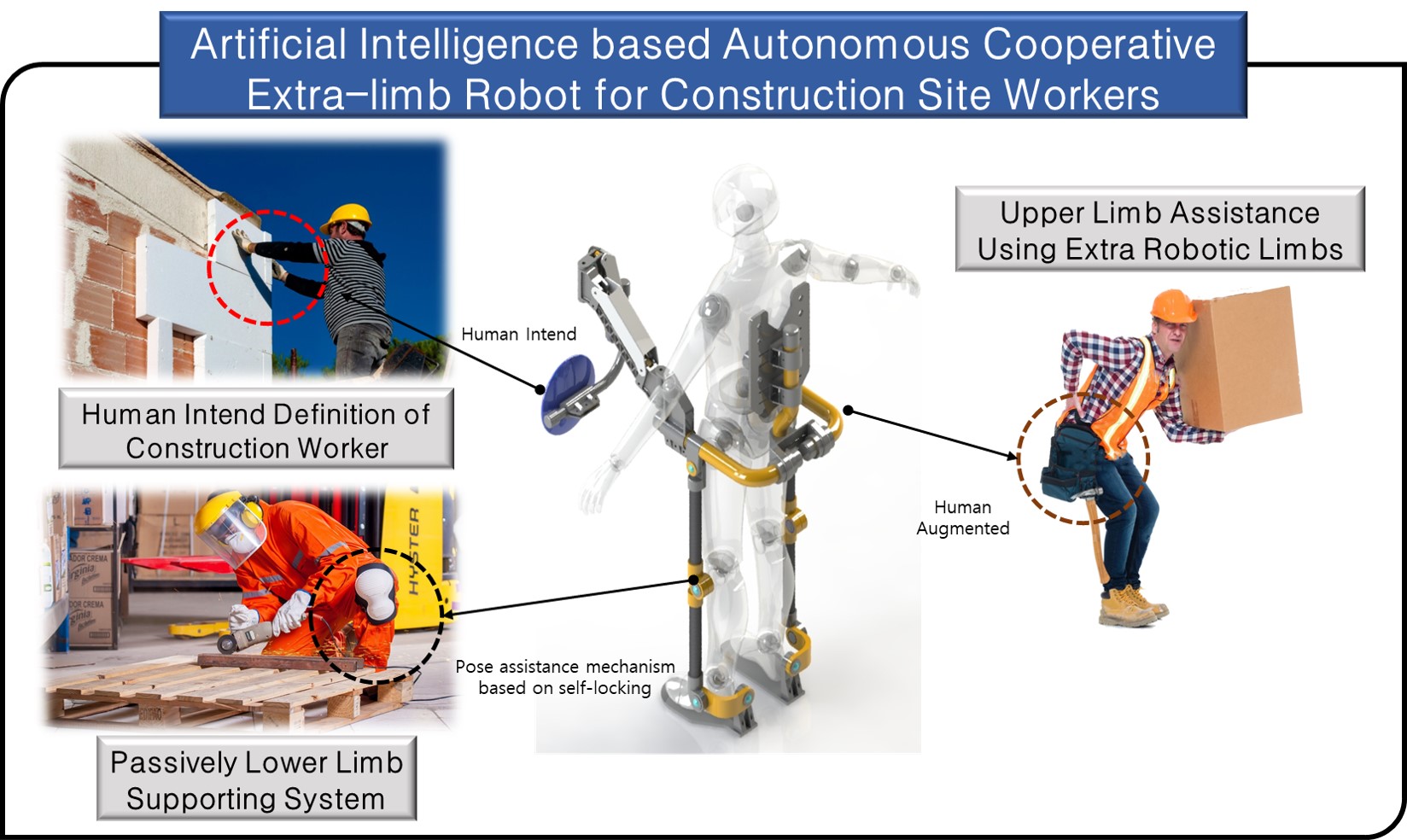
Purpose of Extra-limb Robot for Construction Site Workers
Research Territories
(1) Human Intention Recognition
There are several required conditions to perceive the extra robotic limbs as users’ extended limbs: similar biomechanical characteristics with human beings;
accurate recognition of user intention. In order to achieve those conditions, we are aiming to speculate the user postures and identify the user intention through
foot pressure sensors.
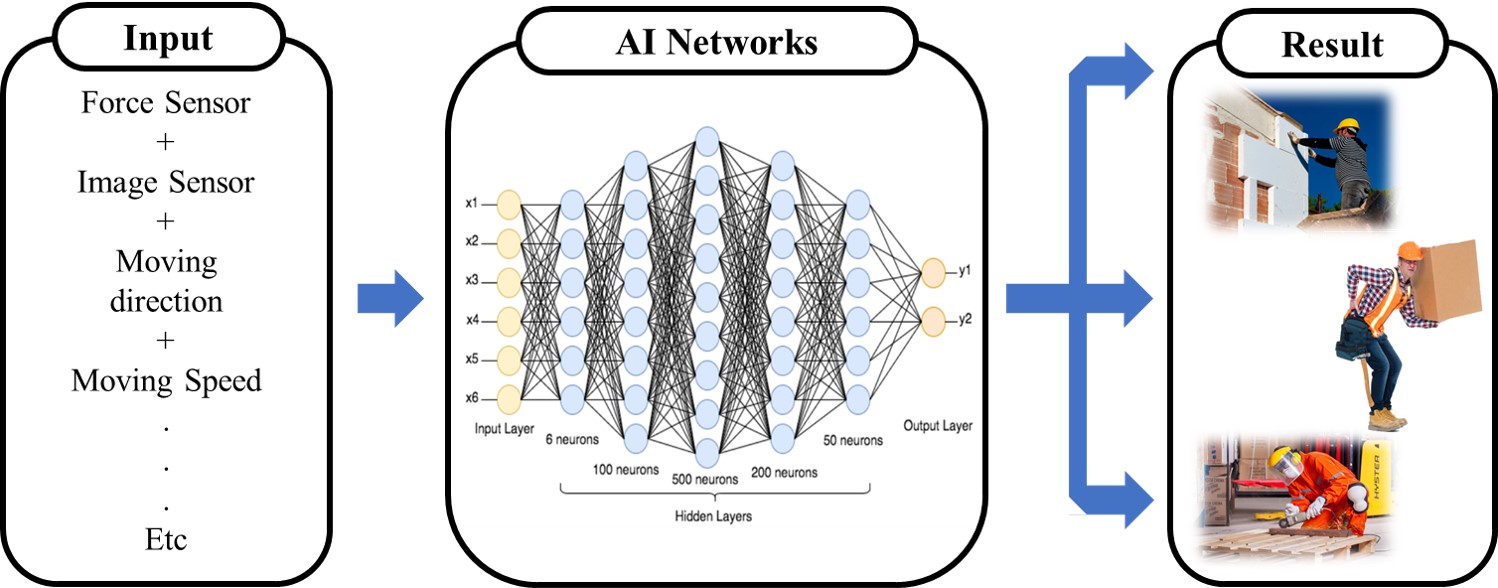
Process of Human Intention Recognition
(2) Parallelogram Linkage Mechanism
Most cases of previous research on designing extra robot limbs are mainly focusing on the series types rather than utilizing linkage mechanisms. However, in conducting construction tasks, dominantly comprised of horizontal or vertical movements, linked mechanisms are beneficial in their relatively compact sizes. Therefore, we considered the necessity of devising a robot with a parallelogram linkage mechanism, proper to assist parallel motions.
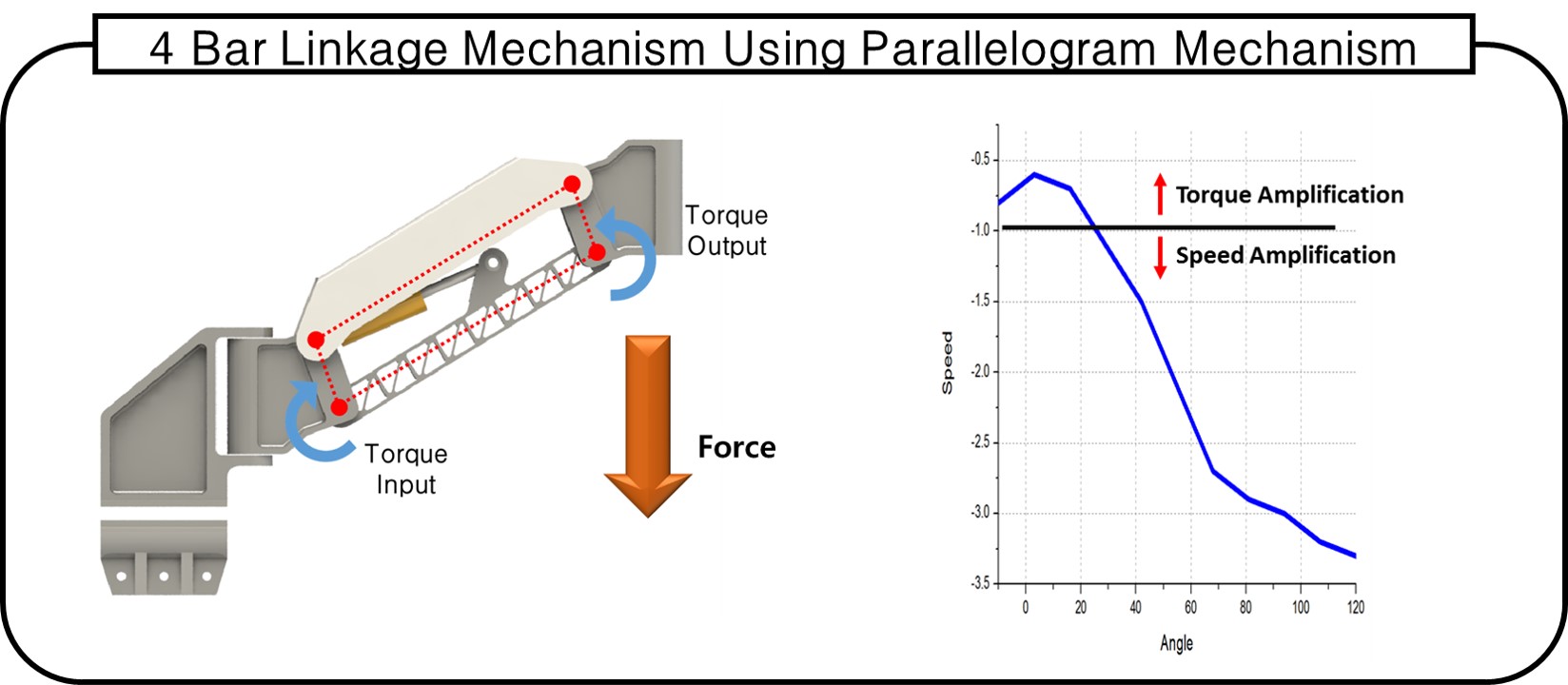
Scheme of Linkage Mechanism
(3) Research for Efficiency Control Method for Construction Workers
Besides the user intention recognition and the robot design with a proper type, controlling the robot accurately is another issue in the study. We have researched on counter-torque control for holding desirable postures. On top of that, we are studying the control techniques of gravity compensation and the ways to directly assist the tasks.