Smart Motor Grader
Introduction / Motivation
The automation and digitalization of the construction business is the most important part for smart construction technology innovation. This project mainly deals with the autonomy and digitalization of road earthworks in these smart construction technology projects. The conventional earthworks in road construction is highly dependent on construction equipment due to the linear and repetitive nature of construction, so it can be considered that process improvement through automation is relatively good compared to other construction processes, but the reality is not easy as we think because of too many issues. When working on equipment used in road construction such as dozers, graders, rollers, etc., increase in reconstruction due to increased construction quality deviation according to worker’s expertise. Since there is no method, equipment waiting time due to construction delays is prolonged, and the time required for inspection also has a significant impact on construction costs. This project is researching and developing equipment capable of autonomous work and driving of grader equipment by performing smart and digitalization of grader equipment.
Research Territories
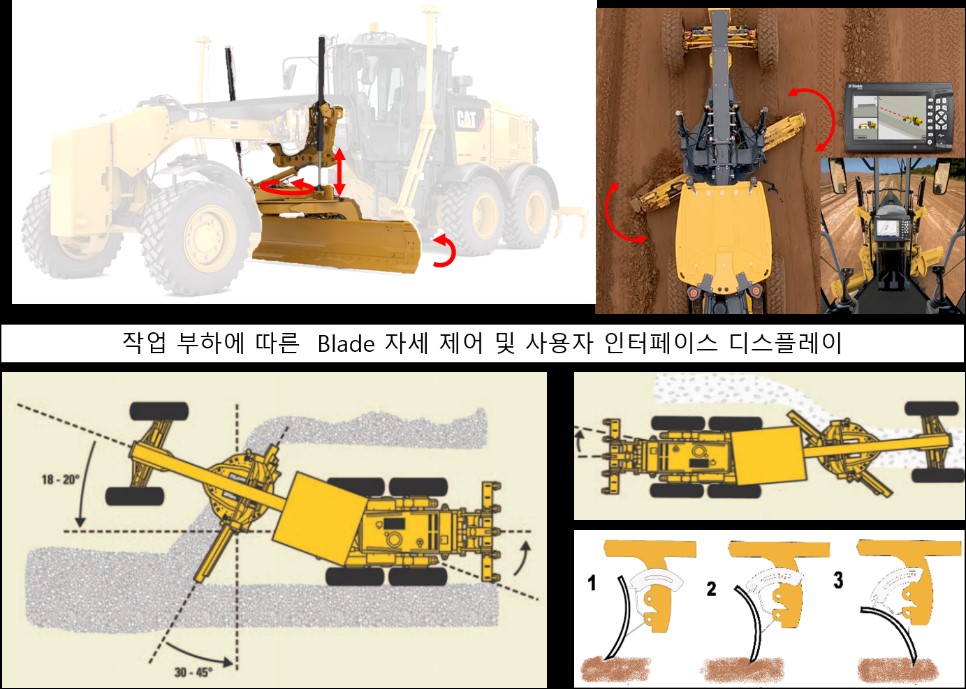
(1) Development of smart motor grader for autonomous work and user interface display module and application
Motor grader blade autonomous work algorithm considering blade workload
Earthworks using a grader in the construction industry shows a great difference in work efficiency depending on the worker expertise. One of the reasons is that the angle and position control of the blade of the grader shows a lot of difference in this efficiency area during construction.
This project is currently researching an autonomous work algorithm that can adjust the position and angle of the blade of a motor grader according to the work load in order to improve the work completion of the construction site according to the worker expertise.
In addition, by developing user-friendly interface display modules and applications, the goal is to make earthwork easier than conventional methods by enabling workers to check information such as the position and angle of the blade and the driving path in real time during earthwork.
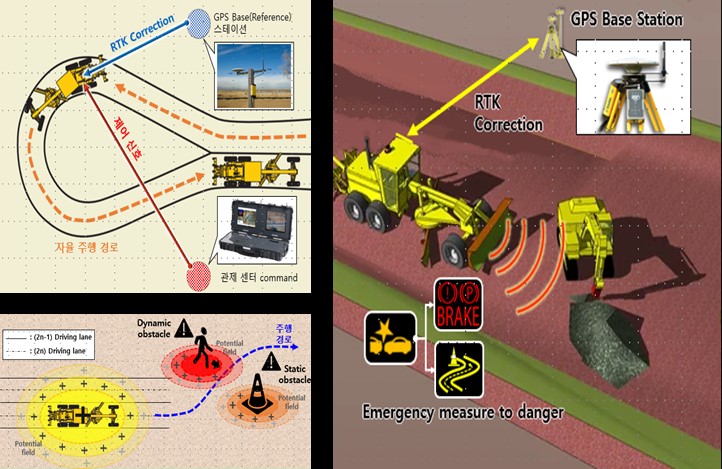
(2) Development of path-following autonomous driving motor grader
In a typical road construction site, trucks distribute soil uniformly on the construction ground, and then the distributed soil is flattened by a grader, and then returned to the starting position to perform additional leveling work. This construction method shows linear and repetitive construction characteristics.
This project is researching the location awareness technology of the equipment in the local area for more accurate autonomous work of the grader, and using this location information, an autonomous driving route generation algorithm is developed to enable the grader to complete the primary work and repeat the work.
Grader work may be labor-intensive and may expose workers to risk due to repetitive work. In order to compensate for this, we also study a path generation algorithm that can prevent accidents in advance by changing the path of the grader when other workers and dynamic objects suddenly approach the surroundings during autonomous driving by following the path of the motor grader.