Intelligent Excavator System
Objective : Development of an algorithm for optimal local path-planning for intelligent excavator
One of the most important tasks in Intelligent Excavator is to locate the bucket fast and accurate to the right position. For this, our idea is to add a contour control on conventional path tracking control algorithms that have been developed by others (PID, Fuzzy, Time-Delay Control, etc.). The tracking accuracy is somewhat sacrificed in order to fortify the contour accuracy. The control inputs to the joint hydraulic cylinders are pushed and/or pulled back and forth to keep track of the contour, whereas overall speed could be slow down within some amount. This is very effective for the finishing task among many earth-moving works
Path Planning Algorithm

Includes :
1. Kinematics/Dynamics Modeling
2. Generation of Optimized Path
3. Force Feedback to Prevent Overturning
4. Algorithm of Avoiding Obstacle
5. Algorithm of Generating Flexible Path
Lab-scale Hydraulic Manipulator
Small-scale hydraulic manipulator was built for various lab tests before going out to real excavator.
The followings are applied to it:
1. Built in electronic hydraulic servo valve
2. Position Control
3. Force Control
4. Impedance Control
5. System Identification between Cylinder Pressures and Bucket Forces
6. Avoidance of earth obstacles
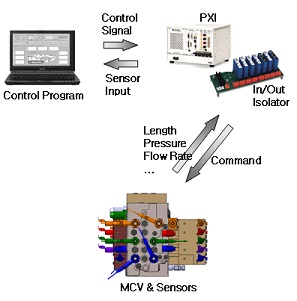
Application to Real Excavator (14ton)
The intelligent excavator consists of the controller, sensors and PXI on the 14 ton conventional excavator. The driver can control the whole system of excavator, using the computer which can communicate the PXI system. The system has also the wire encoders on the each links which can measure the position and the angle of each hydraulic cylinder at below figures show the whole system and the flow of communication.

Reference
- A. J. Koivo, M. Thoma, E. Kocaoglan, and J. Andrade-Cetto ¡°Modeling and control of excavator dynamics during digging operation¡±. Journal of Aerospace Engineering, 9(1), 10-18, 1996
- M. Honegger, A. Codourey, ¡°Redundancy Resolution of a Cartesian Space Operated Heavy Industrial Manipulator¡±, Proc. IEEE Int. Conf. on Robotics and Automation, Leuven, Belgium, pp. 2094-2098, 1998.
- Ho-Gi Kim, ¡°Modellierung und Steuerung von Grossmanipulatoren mit hydraulischen Antrieben¡±, Diss. Technical University Berlin, Carl Hanser Verlag Munchen, Germany, 1994.
- Marcel Honegger, Peter Corke, ¡°Model-Based Control of Hydraulically Actuated Manipulators¡±, Proc. IEEE Int. Conf. on Robotics and Automation, Seoul,Korea, May 21-26, 2001
- F. Bu, B. Yao, ¡°Observer Based Coordinated Adaptive Robust Control of Robot Manipulators Driven by Single-Rod Hydraulic Actuators¡±, Proc. IEEE Int. Conf. on Robotics and Automation, San Francisco CA, USA, April 2000.